日本では、少子高齢化を背景に、人と共存し、人をサポートするサービスロボットへの期待が高まっている。しかし、そうしたロボットの開発には、今なお多くの技術的課題が残されている。そのような中、日立は、人とロボットが共生する未来を実現するための研究開発を進めている。

2005年に愛知万博でお披露目された初代「EMIEW」
日本では、労働人口の減少などを背景に、ロボットが再び注目されている。1970年代に産業用ロボットが実用化されて以来、製造分野を中心にロボットが大いに活躍してきたが、近年の人口減少社会においては、サービス業などの非製造分野での省力化、自動化が求められているからだ。
これに対して日立は、産業用ロボットの黎明期より、時代をリードする先端的な研究開発を進めてきた。人工知能ロボットや極限作業用4脚ロボットの開発はその代表例だ。
そして、日立は将来高まるであろうサービスロボットに対するニーズを想定し、2004年より「EMIEW」の開発プロジェクトをスタートさせた。「EMIEW」は、人と共存し、人をサポートするという「人間共生」をコンセプトとし、人間との共生活動に欠かせない俊敏な移動機能や人との対話のための遠隔音声認識・合成機能などが搭載されることになった。そして、日立グループの研究開発と技術力を結集した結果、わずか1年で完成。2005年に開催された日本国際博覧会(愛知万博)では、「EMIEW」と人間のクラウン(道化師)との競演による大道芸のパフォーマンスを披露し、来場者を大いに喜ばせた。

身長80cm、体重14キロと小型・軽量化された「EMIEW2」
日立は安全性と実用化の両立をめざし、「EMIEW2」の開発に着手した。実用性重視の観点から、大きさや重さ、移動速度を事前に決めたうえで小型化、軽量化を進める一方、雑音の中でも人の声を聞き分けたり、比較的小さな床の段差を乗り越えたりするなど、性能の向上が図られた。人との親和性を高めるため、あえてボディのデザインを先行させる、「EMIEW」とは逆の開発プロセスがとられた。
こうして2007年に完成した「EMIEW2」は、オフィスや公共施設などでの案内サービスを念頭に、ネットワークカメラとWeb上から収集した画像データベースを活用し、ものを認識して探し出すといった、さまざまな先端技術が盛り込まれている。たとえば、ロボット本体に組み込まれる機能を、走行制御や障害物回避などのリアルタイム系処理と、負荷の高い認識・解析処理をバックヤードの情報プラットフォームに分けるリモートブレインコンセプトによって、ロボットの小型軽量化と高度知能処理を両立させることを可能にした。
「EMIEW2」の研究開発で培われた先端技術は、自律移動技術を核として、すでに次世代の事業へ向けて展開している。たとえば、知能化技術と運動機能に関する技術を応用し、「自律移動」する物流支援ロボット「Lapi」を実用化した。また、指定した場所から目的地まで安全に人を運ぶ自律送迎機能を持つ搭乗型移動支援ロボット「ROPITS」も開発を進めている。今後、加速する高齢化社会を前に、高齢者などの安全で快適な近距離移動を実現するモビリティとして期待も大きい。

インフラレス自律移動を可能にした物流支援ロボット「Lapi」
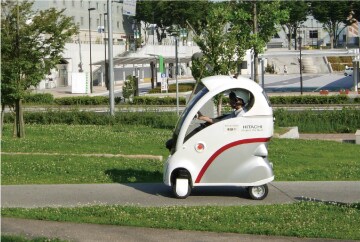
実証実験を続けている搭乗型移動支援ロボット「ROPITS」
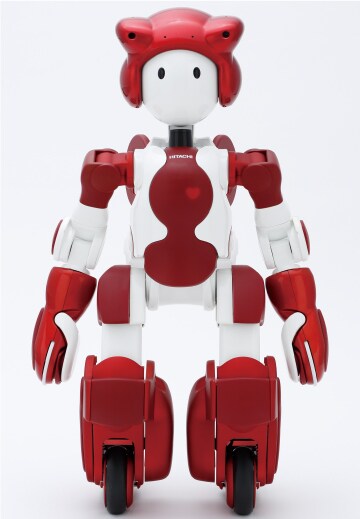
さらに進化した機能が追加された「EMIEW3」
さらに日立は、2016年に「EMIEW2」より進化し、実サービスへの活用を視野に現場で安定した運用ができる「EMIEW3」とロボットIT基盤を開発。同年9月から羽田空港を始め、駅や商業施設などさまざまな場所で実証実験を行っている。「EMIEW3」は身長90cm・体重15kgのボディで、6km/hの移動速度と15mmの段差乗り上げ機能を搭載。また、実サービスの途中での不都合がないよう、転倒時の起き上がり機能を追加した。
「EMIEW3」は、本体と別の場所で知能処理を行うリモートブレイン構成になっており、知能処理はクラウド上に構築されたロボットIT基盤が受け持つ。これにより、ロボット本体の軽量化と同時に知能処理性能の向上や外部システムと連動した機能拡張を可能にしている。さらに、多拠点・複数台のロボットの運用監視と制御を一括して行うことができるため、ロボット間の情報共有やサービスの引き継ぎなども可能になっている。
例えば羽田空港での実証実験では、利用者にトイレなど場所の案内や店舗の情報提供などを行った。その結果、雑音や音量の高いアナウンスが多い空港でもしっかりと利用者の声を拾えることや、「EMIEW3」から話しかけることで利用者が戸惑わずに接することができることなど、実際のサービスに対応できることが確認された。同時に、コミュニケーション面や、利用者を案内する際の自律走行のスピードなど、改善すべき課題も確認することができた。
サービスロボットに興味はあるものの、具体的な活用の仕方やメリットなどが明確でないことで、実際の導入まで至らない企業は少なくない。そこで日立では、顧客協創する場として東京都内や茨城県ひたちなか市に顧客協創施設を設けた。ここには動作検証環境が整備されているため、日立の研究者とお客さまが実際の「EMIEW3」とロボットIT基盤を用いながら、サービスロボティクスの開発を推進できる。さらにお客さまと課題を共有し、その解決アイデアを現場の実証実験で試し、その結果からシステムを改善して実運用につなげるというプロセスで取り組んでいる。
日立はこれからも、社会課題を解決する社会イノベーションの創出のために、ロボティクスの新たな研究・開発に取り組んでいく。
公開日: 2018年3月
ソリューション担当: 日立製作所 研究開発グループ












