HTMLインクルード サイトナビ 人気記事ランキング01
現実とデジタルをつなぐ「コモングラウンド」とは? 事例を交えて紹介

東京都国分寺市にある日立製作所の研究開発拠点「協創の森」。樹々が生い茂る広大な敷地にある研究施設内で、人とロボットが共通認識を持つことをめざす「コモングラウンド」の実用化に向けた研究が行われています。
コモングラウンドとは、建物や都市を構成する場所やモノの性質、さまざまな活動など、膨大な「都市データ」を3D情報でつなぎ、汎用的に扱えるようにすることで、現実世界とデジタル空間をリアルタイムにつなぐ技術です。
これにより、現実世界でロボットを制御したり、3Dアバターが現実世界の施設を案内したりすることが可能になります。どのようにしてこの技術は確立されているのでしょうか。その背景を探りました。
コモングラウンドが実現する世界

コモングラウンドの実現に向けた研究が行われている部屋の天井には、カメラや光センサーなどが取り付けられ、部屋の中には、外部からの制御信号を受信する電動車いすが置かれています。実験は、この電動車いすをロボットに見立てて行われます。
電動車いすは、人が手を挙げると反応し、自動的に移動ルートを決めて、その人に向かって走行を開始。進行途中で他の人や障害物を検知すると一時停止し、別のルートをたどって、手を挙げた人の元までやってきます。
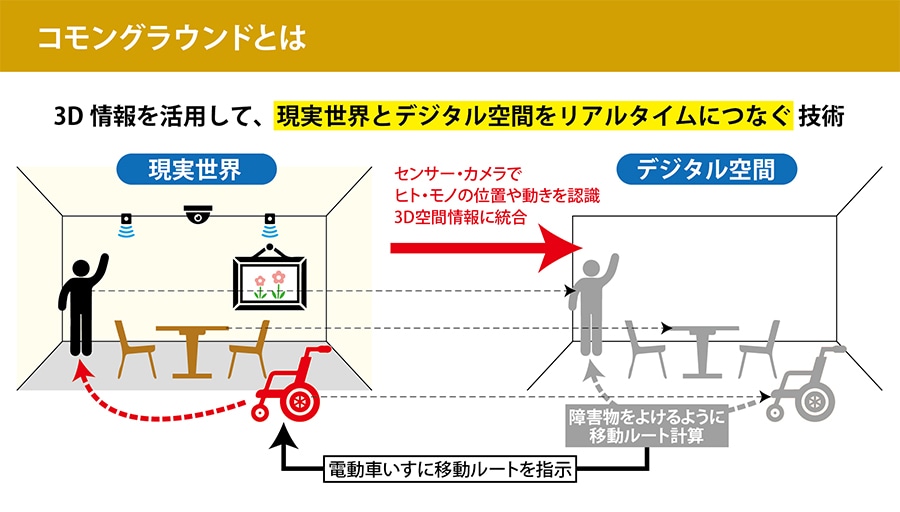
障害物などを検知する機能が備え付けられていない電動車いすが、障害物を避けながら移動できるのは、現実世界の3D情報にセンサーやカメラが検知した人やモノの情報が統合され、そこで計算された移動ルートの情報を電動車いすが受信して移動するからです。
つまり、電動車いす本体が自らの判断によって動くのではなく、コモングラウンドによって電動車いすが制御されているのです。これが、コモングラウンドが実現する世界の一端です。
コモングラウンドが持つ可能性

コモングラウンドの概念を提唱したのは、東京大学生産技術研究所の特任教授で建築家の豊田啓介氏で、日立は豊田氏を始めとした異業種の企業・団体と連携しながら研究を進めています。
日立で同プロジェクトを推進する研究開発グループのデザイナー、坂東淳子さんは、コモングラウンドを介して取得した現実世界の3D情報をAIで処理すれば、「現実世界をより良くできる可能性が広がる」といいます。
「例えば、火災による煙の流れをデジタルデータ上に再現し、カメラやセンサーなどから抽出した現実世界における人の行動の特徴などを組み合わせることで、避難をする人の安全な行動をシミュレーションしたり、避難訓練や救護ロボットの開発につなげたり、といった防災への応用も可能です」
また、コモングラウンドをベースに動くロボットは、製造コストや消費電力を抑えられるメリットもあるといいます。
「ロボット単体が外部の世界を正確に認識し自走するには、沢山のセンサーや膨大なAIの学習データが必要になります。しかし、コモングラウンドが実装されれば、他のロボットに搭載されたセンサーの情報や分析結果が共有されるため、一台のロボットに沢山のセンサーやコンピューティングリソースを搭載する必要がありません」
コモングラウンドの実現に向けて

「社会が発展していく中で、ロボットやデジタル空間上のアバターなどが、人の実世界認識に近づき、あたかも共通認識を持ちえたような状態になる。そんな未来像がコモングラウンドの根底にあります。日立は、そのような未来像に向けて、空間記述の方法やデータの持ち方など、汎用的な仕様を整える取り組みを行っています」(坂東さん)
こうした未来を実現しようと、大阪商工会議所と日立を含めた民間企業5社が運営委員となって、「コモングラウンド・リビングラボ」と呼ばれるコンソーシアムを設立しました。業種の異なる企業が連携しながら実証を進め、将来の都市サービス実装に向けた議論を行っています。
「都市サービス実装には、日立1社では解決できないことが沢山あります。建築や都市の設計に対する理解を深める必要がありますし、ロボットやXRコンテンツの開発を専門とする企業などと協力していくことが必要です。法律や規制を整備していくことも必要でしょう。それらの課題に向き合い議論を深め、世の中を変えていくために私たちはこの場に参加しています」(坂東さん)
「人とロボットが共通認識を持つ」ことをめざすこの取り組みは、まだ始まったばかりです。
「身の回りのさまざまなデータが上手く紐づくことで、ロボットが私たちのことをまるで心から理解しているかのように動いてくれるようになるかもしれない。そんな世界を実現できるように、研究開発やデザインを続けていきたいと思います」(坂東さん)