Introduction of "Common Ground," with a Case Study: What It Is and How it Connects the Digital and Physical
Mar. 26, 2024
Yuichi Yamagishi

Kyoso-no-Mori is a Hitachi, Ltd. research and development site in Kokubunji City, just outside of Tokyo. Situated in a vast and thriving forest, this site is the place of research and initiative to implement "Common Ground," a concept aimed at people and robots possessing a common understanding.
"Common Ground" refers to technology that links physical and digital in real time. It achieves this by bundling huge amounts of urban data—places comprised of buildings and cities, the characteristics of things, various activities, and so on—to 3D information, and then enabling it to be handled in practical applications.
Among the many possibilities, this will unlock the potential for robots to be controlled in the real world and for 3D avatars to provide guidance in the real world. This article looks into the background to the establishment of this technology.
The world realized by Common Ground

The ceiling of a room where research into realizing Common Ground is installed with cameras and light sensors. Inside the room is an electric wheelchair that receives external control signals. For the purposes of this experiment, the electric wheelchair is considered as a robot.
When someone raises their hand, the electric wheelchair automatically determines a travel route and starts to move toward that person. If it detects another person or an obstacle during transit, it stops and then follows a different route toward the person who raised hand.
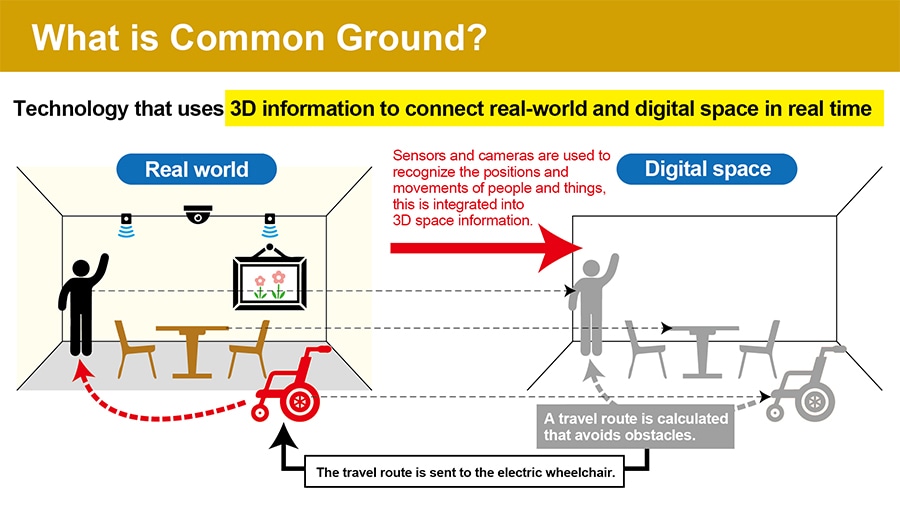
The electric wheelchair is not equipped with detection functionality for obstacles and other items. The reason it can move avoiding them is as follows: Information on people and things detected by sensors or cameras is integrated into 3D information that link to real-world. This is used to calculate travel route information. After receiving this information, the electric wheelchair proceeds to travel.
In other words, instead of moving based on judgements with it’s own detection, the electric wheelchair can be controlled by Common Ground. This is one part of a world created by Common Ground.
Common Ground possibilities

The Common Ground concept was proposed by Keisuke Toyoda, who is an architect as well as a project professor at the Institute of Industrial Science, Tokyo University. Hitachi has been conducting research in partnership with companies and organizations from other fields, including Professor Toyoda.
Atsuko Bandou, a designer belonging to the Research & Development Group, which is running this project, said that using artificial intelligence (AI) to process real-world 3D information obtained through Common Ground will "expand possibilities for being able to make the real world better."
"For example, if we reproduce the flow of smoke caused by a fire as digital and combine this with behavioral features of real-world people extracted from cameras and sensors, we will be able to apply it to disaster measures, such as simulations of safe behavior for people during evacuations, fire drills, and rescue robot development."
Adding that robots that move based on Common Ground also have the merit of reducing manufacturing and electrical power costs, she further explained that:
"For robots themselves to accurately understand the external world and operate on their own would require a multitude of sensors and huge amounts of AI training data. However, with the implementation of Common Ground, information from sensors mounted on other robots and analysis results are shared. This makes it unnecessary to mount lots of sensors or computing resources onto a single robot."
Toward realizing Common Ground

Bandou said that "As society develops, robots, digital avatars, and such entities will approach human recognition of real-world. It will be as if they possessed a common understanding with people. This vision for the future is the fundamental basis for 'Common Ground.' To achieve such a vision, Hitachi is preparing general-purpose specifications for spatial description methods, data holding methods, and other requirements."
To realize such a future, the Osaka Chamber of Commerce and Industry and five private companies, including Hitachi, formed a management committee and established a consortium called "Common Ground Living Lab." Companies from different fields collaborate in carrying out demonstrations and also discussing the future implementation of urban services.
According to Bandou, "In the future implementation of urban services, there are many things that Hitachi cannot solve as a single company. We need to deepen our understanding of architecture and urban design and to collaborate with companies and organizations that specialize in robot and XR content development. It will probably be necessary to develop laws and regulations. We are participating in this consortium in order to face these issues, deepen discussions, and change the world.
"This initiative, which seeks for people and robots to have a common understanding, has only just started.
"Successfully linking various data from our surroundings can lead to robots capable of behaving as if they truly understand us. I intend to continue with research & development and design so as to make such a world a reality."