物流分野では、消費者ニーズの多様化やインターネット通販の急速な普及などに伴い、複雑化する倉庫作業の効率化が求められている。しかし、現状の自動設備は、扱う商品や作業の種類が制限され、導入できる倉庫が限られてしまう。そんな中、日立は、多様な物流倉庫の集品作業を自動化する自律移動型双腕ロボットの開発を進めている。
物流は、産業や生活を支えるライフラインとして重要な役割を担っており、人間の体では血液の流れにたとえられる。昨今の消費者ニーズの多様化、インターネット通販の急速な普及などを背景に、物流ネットワークの要となる倉庫では、扱う商品の数や種類が日々著しく変動している。この変動に柔軟に対応しつつ、高い効率で運営していくことが求められており、この難問を解決する手段として、物流支援ロボットに対する期待が高まっている。
日立は、1960年代の産業用ロボット黎明期よりロボットの研究開発に取り組んでおり、たとえばアーク溶接用ロボットなどの製造支援用から、宇宙ロボットアームのような特殊環境作業用まで、さまざまなロボットを開発してきた。
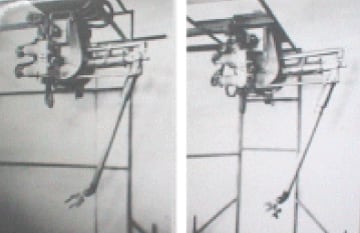
1963年に開発された、2つの腕機構からなるサーボマニピュレータ(遠隔操作装置)
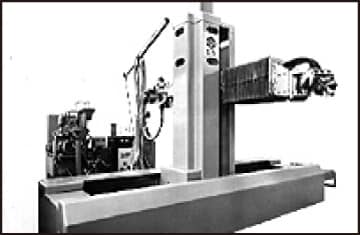
1975年に製造された、国産初のアーク溶接用ロボット
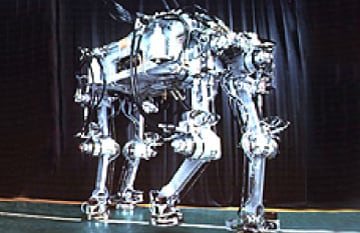
1990年に開発された、四脚動歩行ロボット

2009年に製品化された、床にマーカーを敷設しなくても自律移動が可能な無人搬送車
その後、2003年頃よりロボットの知能化に焦点を当て、自律移動を具体的なテーマとして研究を進めつつ、その技術を応用した物流搬送システムの開発を本格化させた。そのねらいは、業務の変化に対応する柔軟性と効率とを両立可能な、革新的なロジスティクスの実現であった。
日立は、2009年に自ら地図をつくってマーカー(白線などの軌道)なしで移動できるインテリジェントキャリーを製品化した。さらに2015年、こうした無人搬送車向けに商品棚の配置変化にも対応できる自律走行技術を開発した。
一般に無人搬送車は、工場や倉庫などでの物流効率の向上に寄与するが、たとえば物流センターでは、無人搬送車が搬送する商品などを棚から取り出し配送先ごとに仕分けなければならないため、やはり人手が必要となってくる。一方、品種の少ない倉庫では、集品作業を効率的に実施するために、自動ラックや仕分けソータなどの固定設備の導入による自動化が進められている。しかしながら、このような現状の設備は、扱う商品の数や種類の変動に対応することはできず、今後増加する変動の激しい物流倉庫の作業を抜本的に効率化することは難しい。

2015年に開発した自律移動型双腕ロボット。走行台車の上に高さを調節する昇降台を載せ、2本のアームでさまざまな連携動作を行う
そこで、日立は物流倉庫で多様な商品の取り出し作業を人間並みに素早くできる物流支援ロボットの研究に取り組んだ。その成果が、2015年に開発した自律移動型双腕ロボットである。この双腕ロボットは、走行台車の上に高さの調節が可能な昇降台を載せ、さらに2本の市販の産業用アームと、つかむ、吸着するなどを行う手作業の手に相当する"グリッパ"を搭載している。センサーで自らの位置や取り出す商品などを認識し、移動しながら棚の中から目的の商品を見つけて取り出す。単に商品を片手で取り出すだけではなく、2本のアームを相互に活用する動作、たとえば、保管箱の中に入っているペットボトル飲料を引き出して取り出す、片手に持っている箱に商品を詰める、1本のアームでは取り出せない箱をもう1本のアームで支えて取り出す、なども行うことができる。
自律移動型双腕ロボットのカギとなったのは、日立が新たに開発した連携制御技術だ。さまざまな商品や格納状況に対応し、柔軟で素早い動作を実現するためには、走行台車、昇降台、2本のアームの連携が必要となってくる。しかし、従来の連携方法では、通信量や演算量が膨大となるか、あるいはプログラムが煩雑となるため、それらが動作不具合の要因につながる恐れがあった。今回日立が開発した独自の連携制御技術は、走行台車、昇降台、2本のアームを少ない通信量で効率的に連携できるように制御する。ロボットが動作するにあたって必要とする最低限の情報や、適切なタイミングを事前に定義することによって、通信量を抑えたまま複数のプログラムを連携させ、柔軟で素早い動作を実現したのである。
現在、インターネット通販の世界的な普及に伴い、物流の変動は著しく拡大している。そんな中、日立は大規模物流センターが取り扱う、形状や重さが多種多様な商品にも対応できるよう、"グリッパ"性能のさらなる検討も含めてソフトウェア・ハードウェア両面での改良に取り組んでいる。数年後に日立グループ内にて実用化し、その後の市販化も視野に入れている。無人搬送車と、この自律移動型双腕ロボットを連携させれば、将来的に無人倉庫システムの実現も夢ではなくなる。このように先進的なロボットの導入により、物流倉庫に変革がもたらされれば、その変革の流れはロジスティクス全体へと波及していくことが期待される。日立は、物流支援ロボットの研究開発を通じて、産業や生活を支える物流分野においてもイノベーションを創出していく。
こうした物流支援ロボットの研究開発に加え、日立はロジスティクス全体を管理する先進的な物流コックピットシステムの開発も推し進めている。物流コックピットシステムとは、複数の全方位カメラの画像を 三次元環境内の仮想スクリーンにマッピングすることで、倉庫内の全体を直観的に捉えられる画像を作成。
さらに、時間経過に合わせて全体を俯瞰することのできるUI(User Interface)を搭載したプロトタイプを開発している。巨大な物流倉庫の現場全体を可視化することにより問題点を発見し、物流のさらなる効率化・柔軟化につなげられる。このように日立は、「未来の倉庫」の実現をめざし、今後もさまざまな角度から研究開発を加速する。
公開日: 2016年3月
ソリューション担当: 日立製作所 研究開発グループ