ロボティクス
幅広い領域で社会に貢献する、日立のロボティクス
多種多様なロボットを提供し、IoTプラットフォームとの融合も推進。
人々のより良い生活の実現をめざします。
協創を加速し、新たな価値を生み出すIoT。しかし、そのポテンシャルを最大限に引き出すには、サイバー空間でのデータ処理だけでは十分ではありません。
現実の世界で高度なサービスを提供するには、実空間の中で物理的な動作を行い、外界とやり取りできる「ロボティクス(ロボット)」も重要な存在になります。
日立はOT(オペレーショナルテクノロジー)で培った技術と経験を活かし、幅広い領域をカバーする多種多様なロボットを提供。また、ロボットとIoTプラットフォームとの融合も進めています。
さらに、これらを社会基盤で活用することで、人々の生活をより良くするための取り組みも積極的に推進。単なる技術開発だけではなく、社会貢献を意識した事業を展開しています。

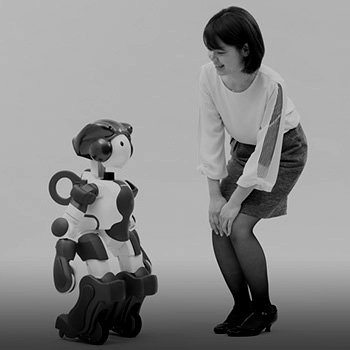
例えば、人間共生型ロボット「EMIEW3」では、各種センサーで得られたデータを、ネットワークを通じてクラウドベースのIT基盤に集約。
ここでサービス提供に必要な情報処理を行い、その結果をロボットへフィードバックして行動をナビゲートすると共に、豊かなコミュニケーション能力も実現しています。
このIT基盤は業務システムとも連携でき、ビジネスに関連した各種情報を活用したナビゲーションも可能。複数のロボットを相互連携させたビジネスソリューションも実現できます。
すでに半世紀にわたって技術を開発、お客さまとの協創による価値創出も重視しています。
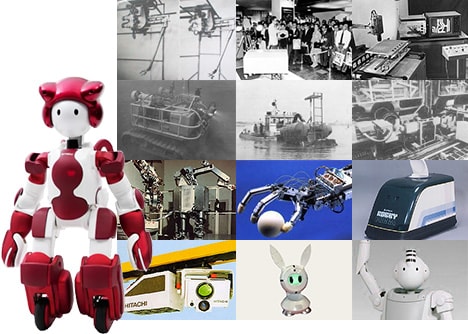
日立グループのロボティクスの歴史は、1960年代の原子力施設におけるサーボマニピュレーターから始まっています。その後、半導体検査装置や金融端末などのメカトロニクス製品から、原子力などの極限環境向けロボットまで、幅広い種類のロボットを提供するようになりました。
その一方で日立の研究開発では、先進的なロボティクスを技術開発のビークルと位置付け、自動制御や知能処理などの技術開発を推進してきました。人間共生型のロボットも2005年にいち早く実現。新たな要素技術を開発しながら段階的に機能を拡張し、2016年には人と対話し実業務を担えるサービス支援ロボット「EMIEW3」も開発しています。
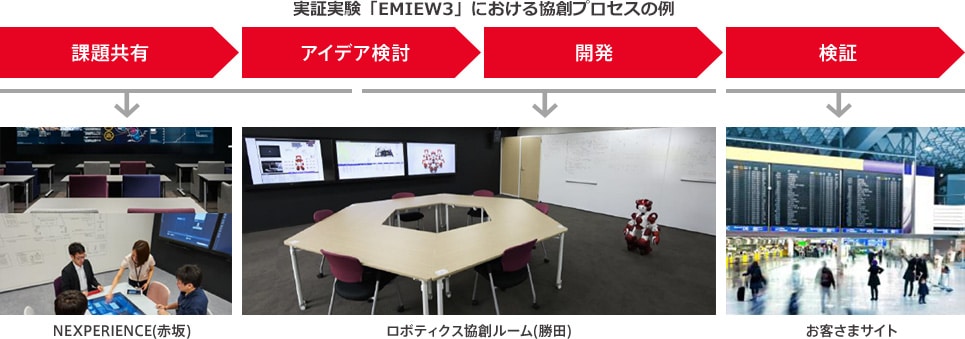
お客さまとの協創による価値創出も重視しています。お客さまと実証実験を行うための環境整備も積極的に推進しており、そのためのスペースも複数の拠点で展開。これを活用することで、質の高いプロトタイピングを実施できるようにしています。
近年ではIoTの活用が進み、さまざまな情報や知識がサイバー空間に蓄積されるようになってきました。これに伴い、蓄積された情報や知識を活用した、実空間で動作するロボティクスによるサービスの現実性が高まっています。日立はこれまで取り組んできたロボティクス開発をさらに加速し、IoT時代のロボティクスソリューションを提供。将来の社会課題の解決に向け、社会イノベーションを加速し続けていきます。
すでに多種多様なロボット達が、お客さまに新たな価値を提供しています。

人と能動的にコミュニケートする人間共生ロボット
「EMIEW3」
日立がこれまで蓄積してきた知見を結集し、より高度な自律性を実現したロボットです。機体の監視と制御を行うロボットIT基盤を「リモートブレイン」としてクラウド上に実装、これとロボット機体をリアルタイムに連携させることで、接客や案内の支援を行います。機動性とコミュニケーション能力に優れており、自ら能動的に話しかけてサービスを行うことも可能。多様なサービスシーンで周辺を的確に把握・理解しながら、人をサポートする頼もしい存在として、ユーザーの満足度や業務効率の向上に貢献します。

歩道を自律走行する一人乗りの移動支援ロボット
「ROPITS」
携帯情報端末で指定した位置へ自律走行ができる「任意地点自律送迎機能」を備えた、一人乗りの移動支援ロボットです。街のどこからでも携帯情報端末の地図で簡単に呼び出すことが可能。呼び出されたROPITSは任意の地点まで自律的に搭乗者を迎えに行き、目的地まで連れて行きます。複数センサーを融合した3次元環境認識によって、障害物も自動的に回避。アクティブサスペンションの搭載により、うねりや凹凸のある歩道でも、バランスを崩さずに安定して走行できます。高齢者や歩行が困難な方の近距離移動の支援に威力を発揮します。

ロジスティクスの近未来を切り拓く
「自律移動型双腕ロボット」
消費者ニーズの多様化に伴い、物流分野では複雑化する倉庫作業の効率化が求められていますが、現状の自動設備は扱う商品や作業の種類が制限され、導入できる倉庫が限られてしまいます。この問題を解決するために日立が開発したのが、自律移動型双腕ロボットです。走行台車の上に高さの調節が可能な昇降台を載せ、2本の市販の産業用アームと、つかむ・吸着するといった「作業員の手」の役割を担う「グリッパ」を搭載。センサーで自らの位置や取り出す商品などを認識し、移動しながら棚の中から目的の商品を見つけて取り出すことができます。また単に商品を片手で取り出すだけではなく、2本のアームを相互に活用する動作も可能。倉庫からロジスティクスの近未来を切り拓きます。
※自律移動型双腕ロボットは、あくまで研究開発段階で、実用化は未定です。
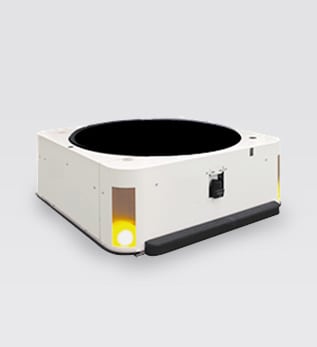
製造ラインや物流倉庫の作業効率を高める小型・低床式無人搬送車
「Racrew」
最近では製造ラインや物流倉庫の作業効率を高めるため、自動搬送システムの導入が進められています。しかし、自動搬送システムは初期コストが高く、レイアウト変更などへのフレキシブルな対応が困難という問題があります。これを解決するために日立が開発したのがRacrewです。小型かつ低床なこの搬送車は、棚の下に潜り込んで棚を持ち上げ、そのまま指定位置まで自動搬送します。これによって作業者自身が移動することなく、部品や商品などをピッキングできるようになります。また収集・蓄積した運用データを元に、日立のデータアナリティクスのノウハウを活用した分析・シミュレーションを行うことも可能。棚の最適配置や搬送ルートの渋滞回避などによって、搬送効率を改善できます。